
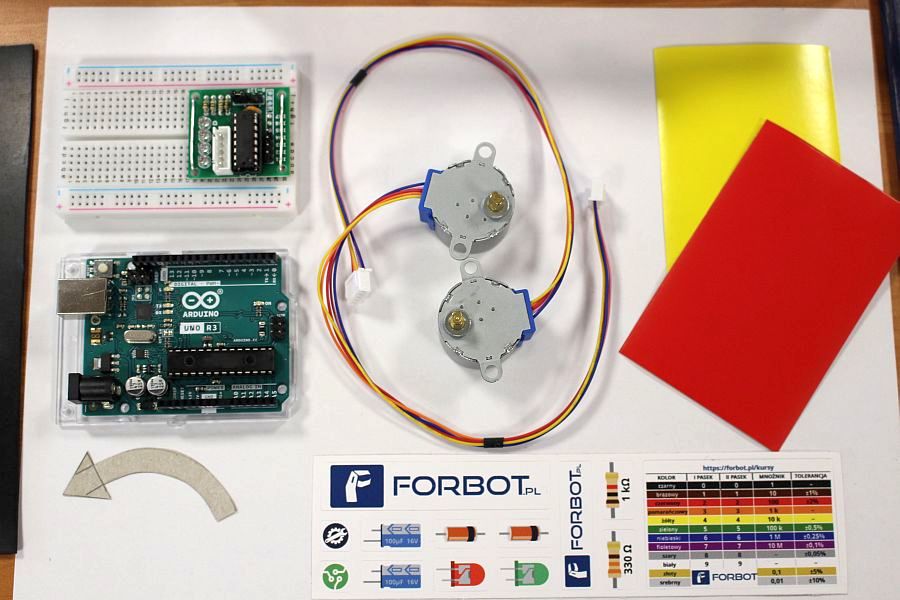
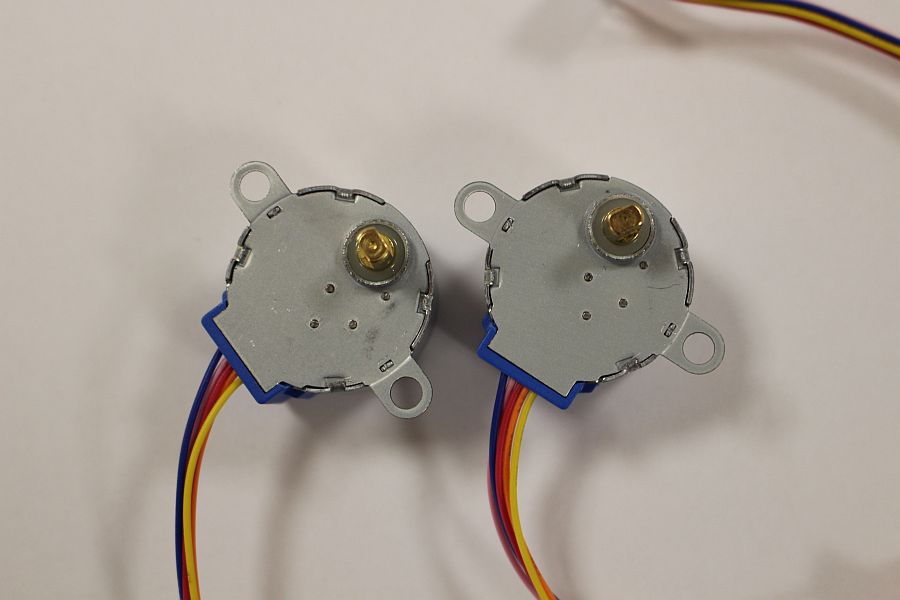
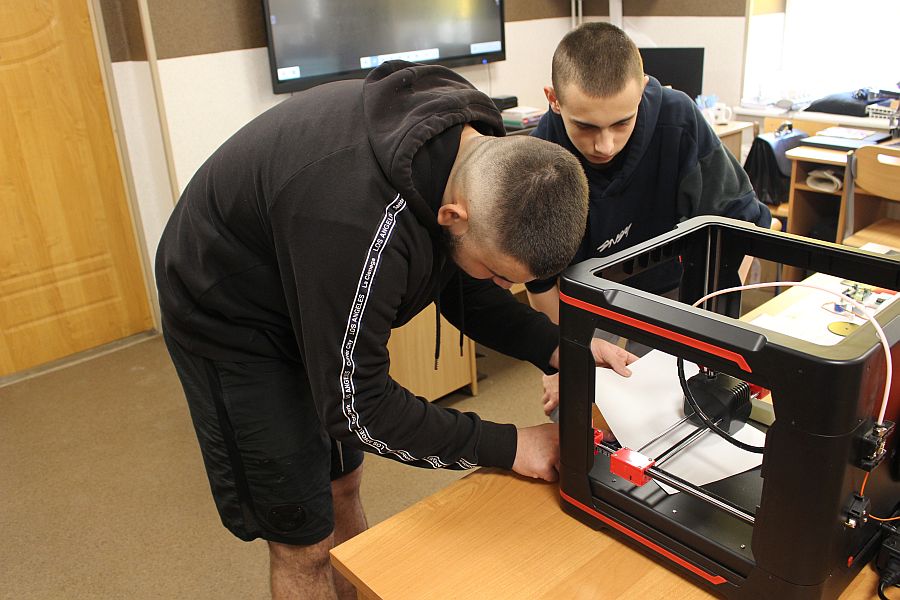
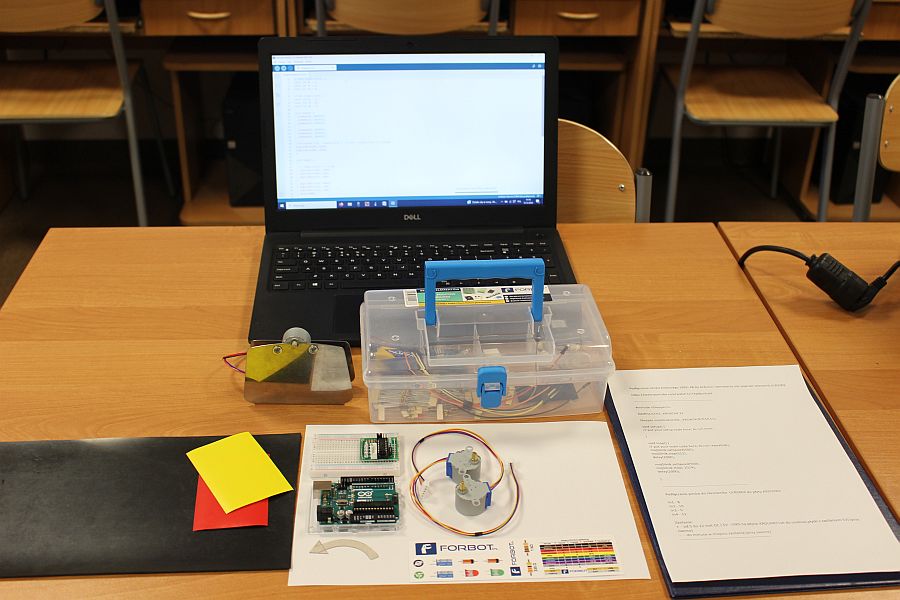
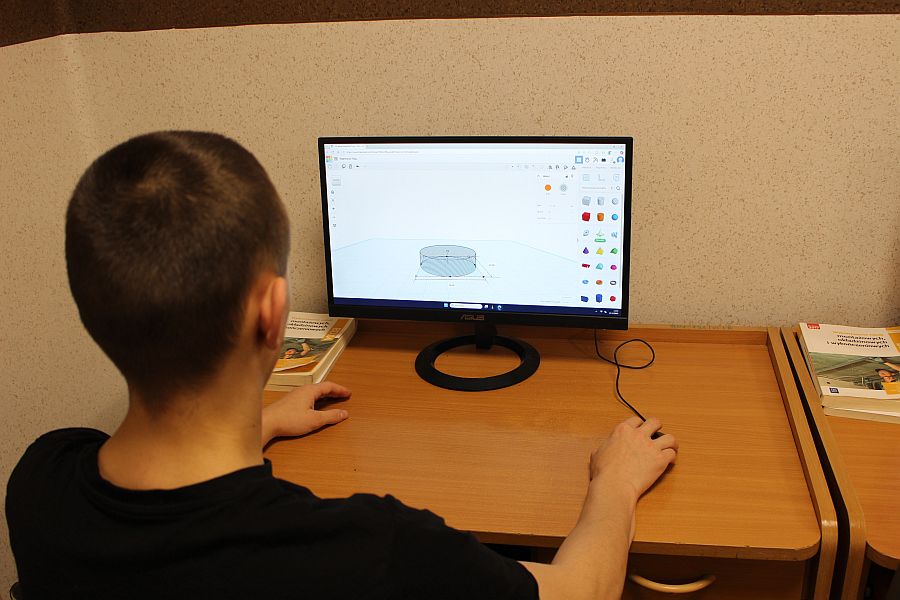
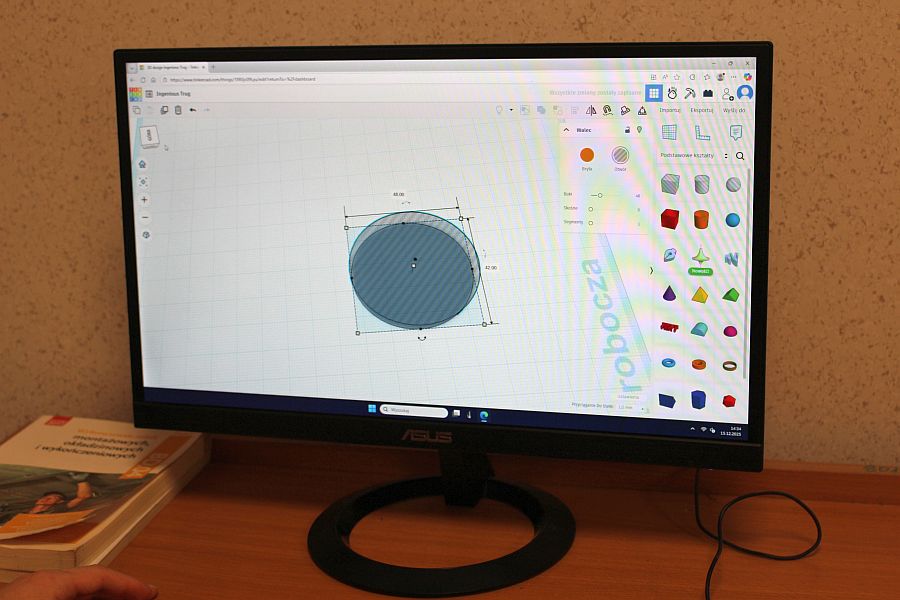
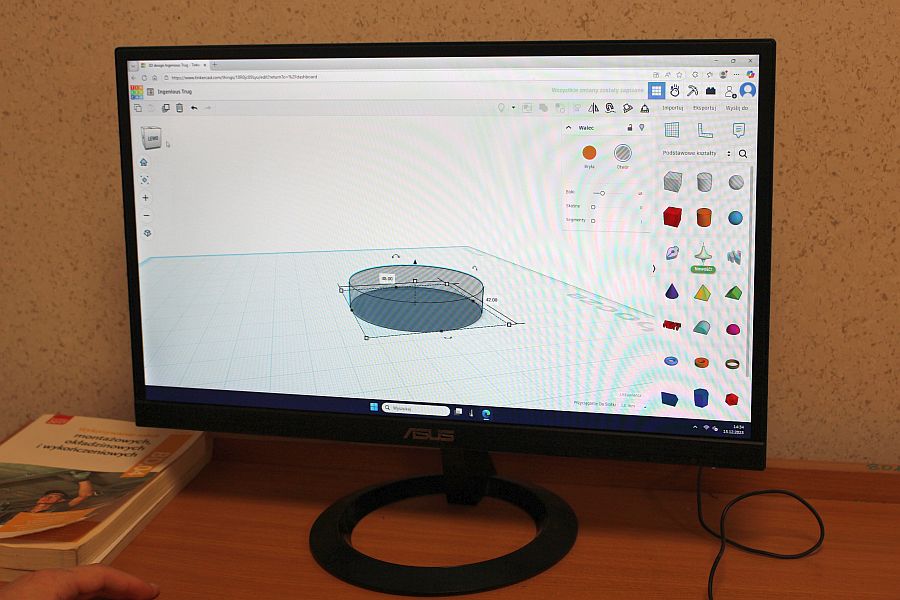
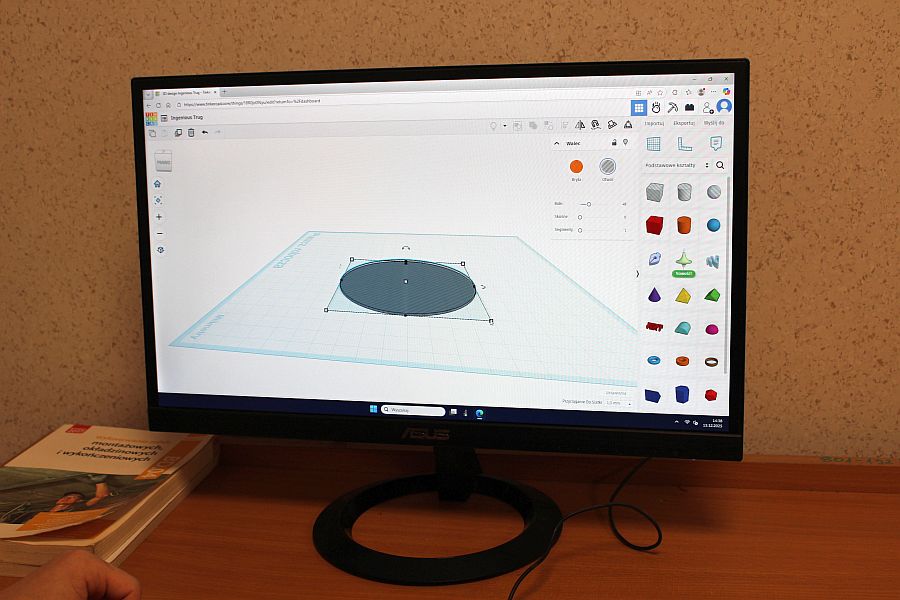
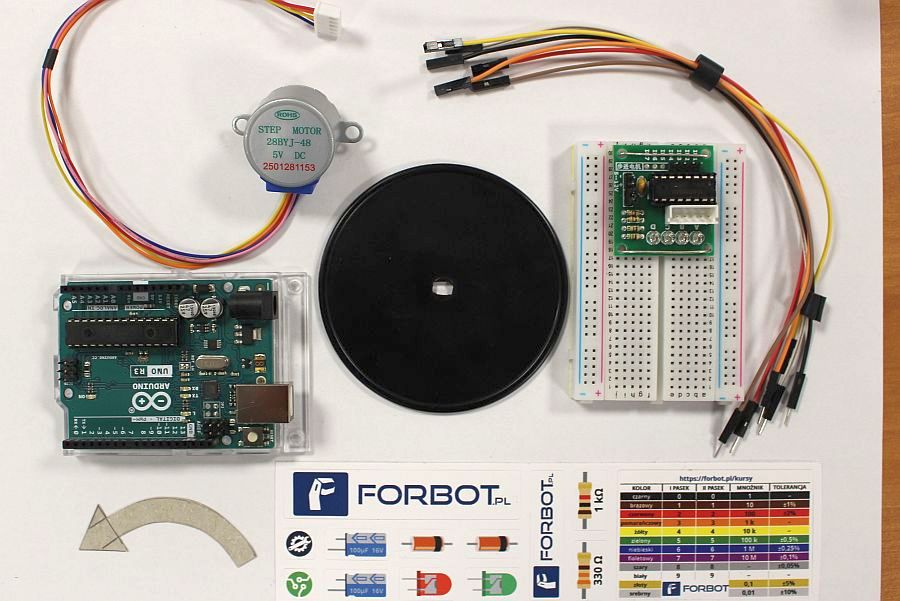
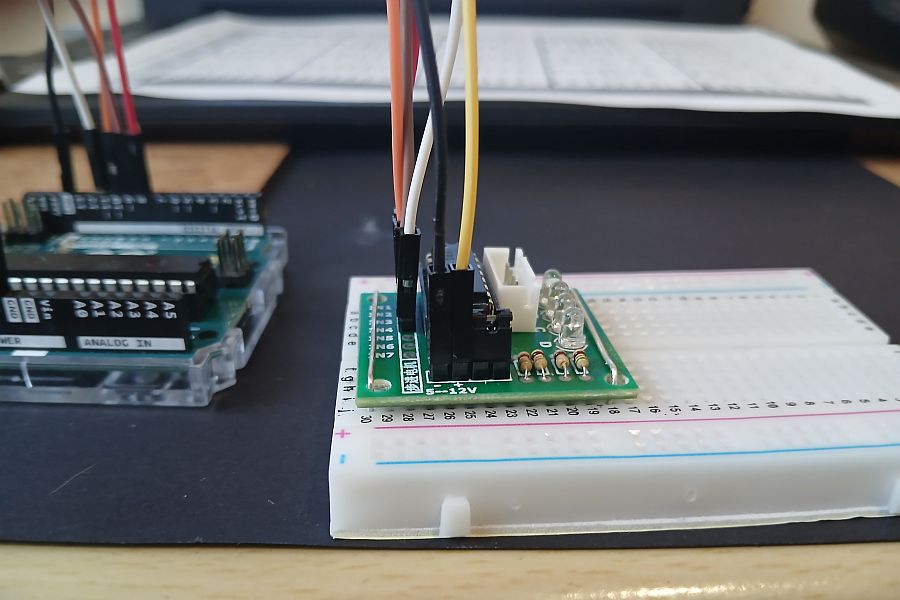
W grudniu, podczas zajęć koła robotyki i mechatroniki nasi uczniowie zajmowali się budową i programowaniem pracy układu mechatronicznego. W tym przypadku był to silnik elektryczny sterowany zaprogramowanym modułem elektronicznym. Na pierwszym etapie projektu gromadziliśmy podzespoły niezbędne do budowy układu, takie jak: silnik o mocy 0.5 W, płytka z mikroprocesorem, moduł sterujący ULN 2003 i okablowanie. W tym czasie chłopcy przygotowywali również drukarkę 3D do wydruku koła silnikowego, które podczas zajęć samodzielnie zaprojektowali Grzegorz i Paweł. Model koła uczniowie sami wykonali na platformie do projektowania 3D i układów elektronicznych – TINKERCAD >>>
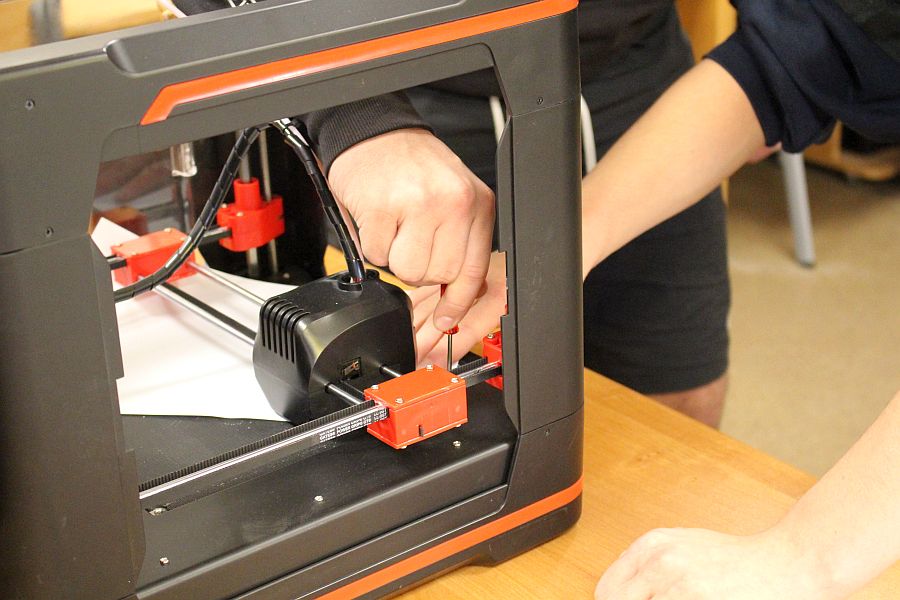
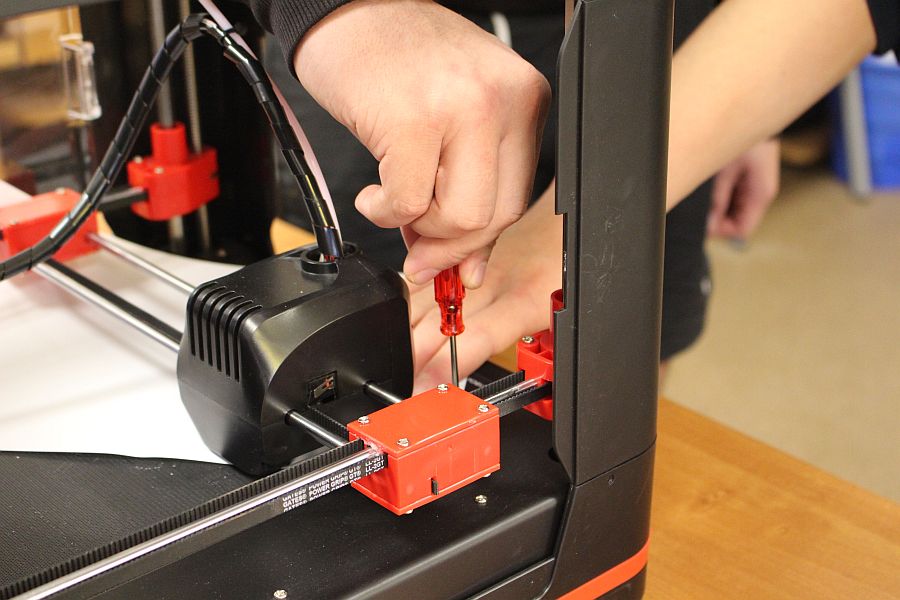
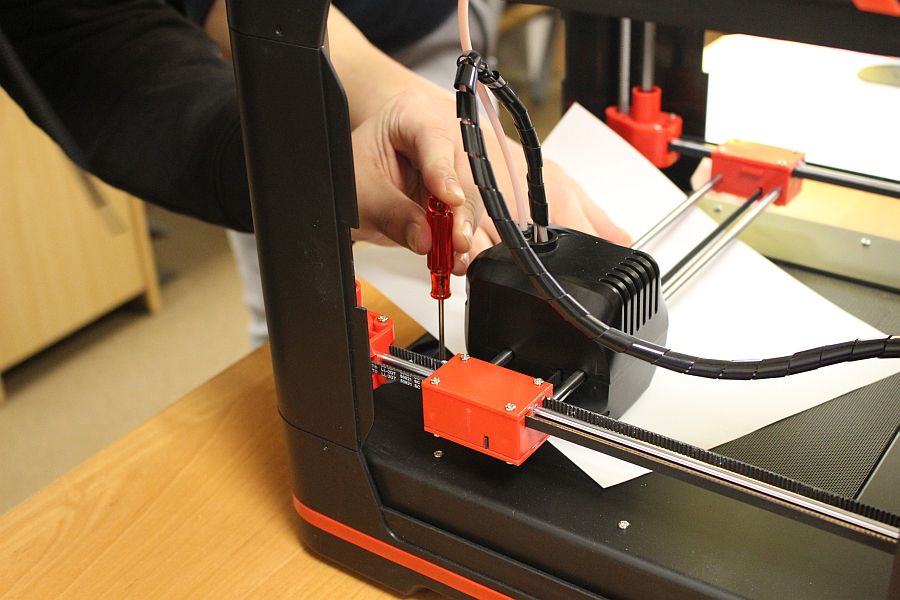
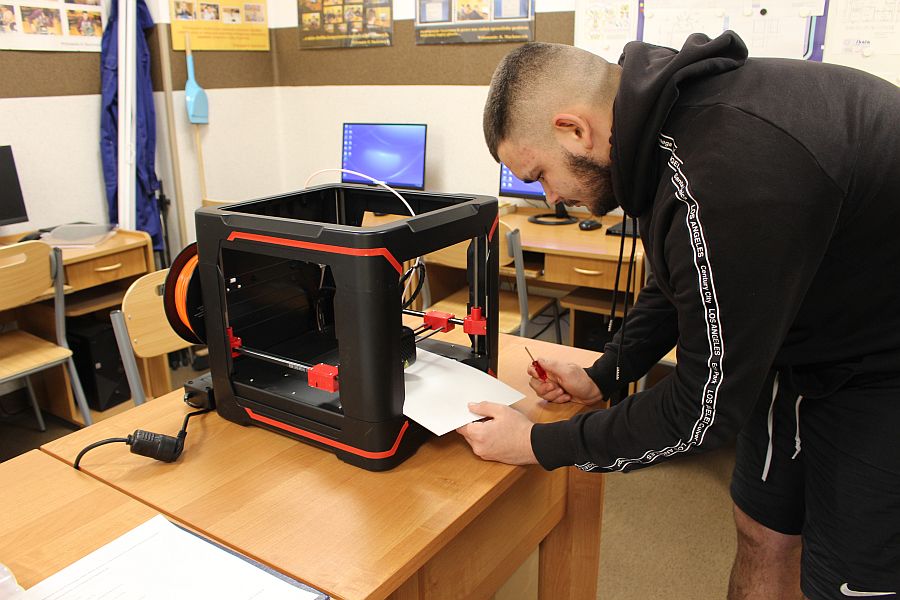
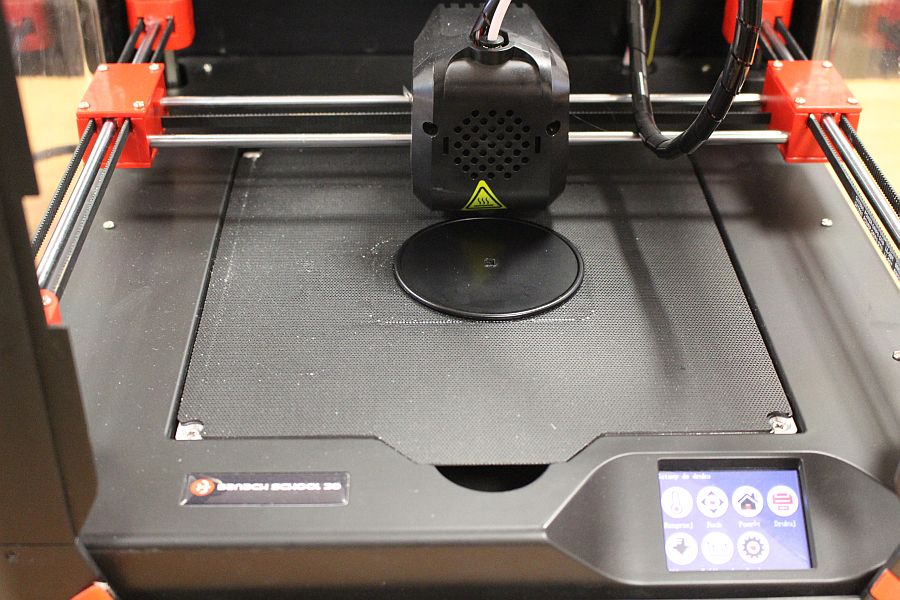
Po kalibracji podstawy drukarki i przeniesieniu pliku STL do urządzenia, wydrukowaliśmy model koła osiowego.
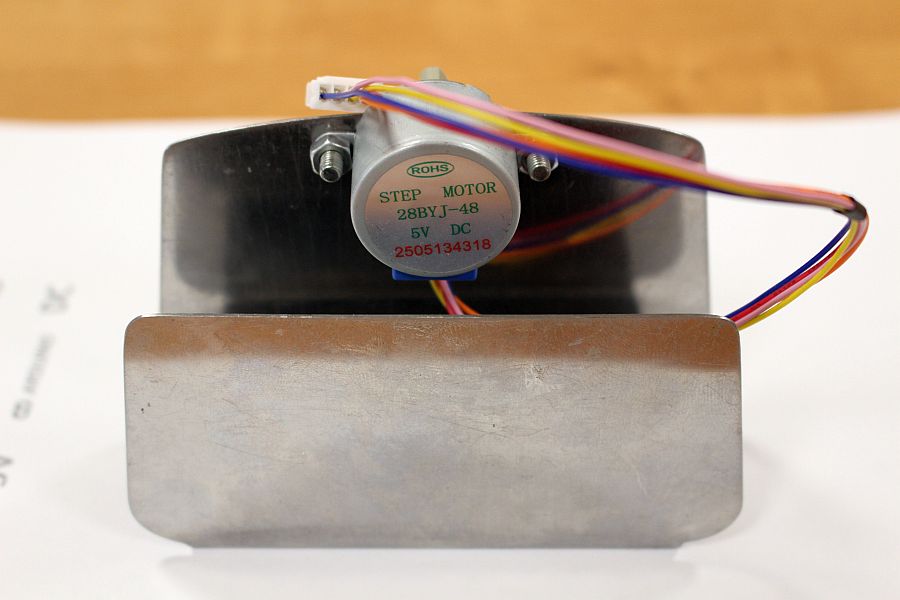
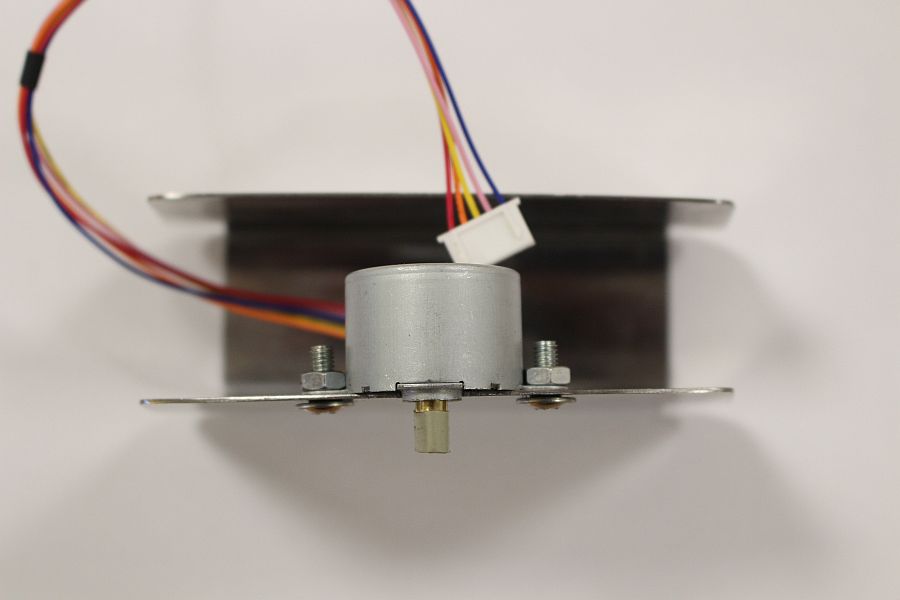
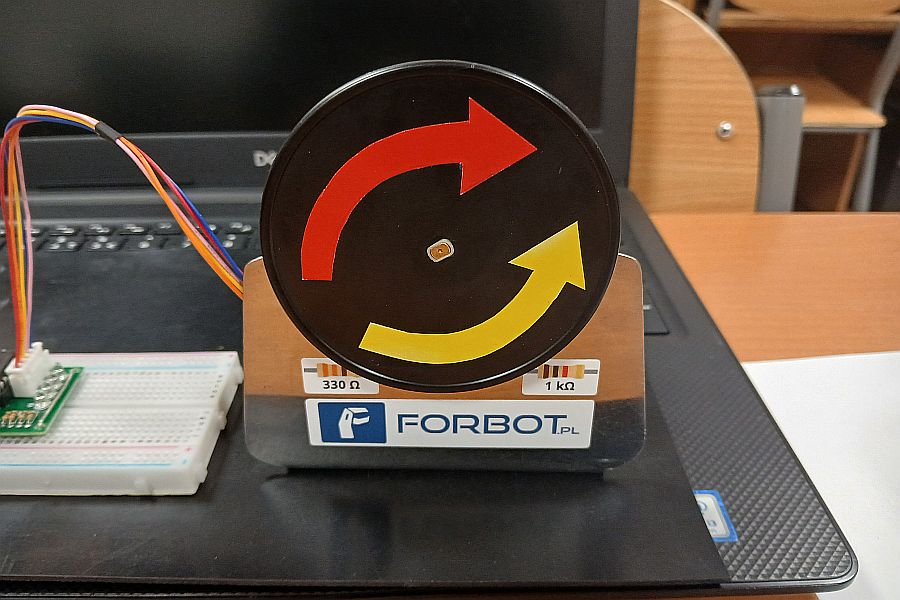
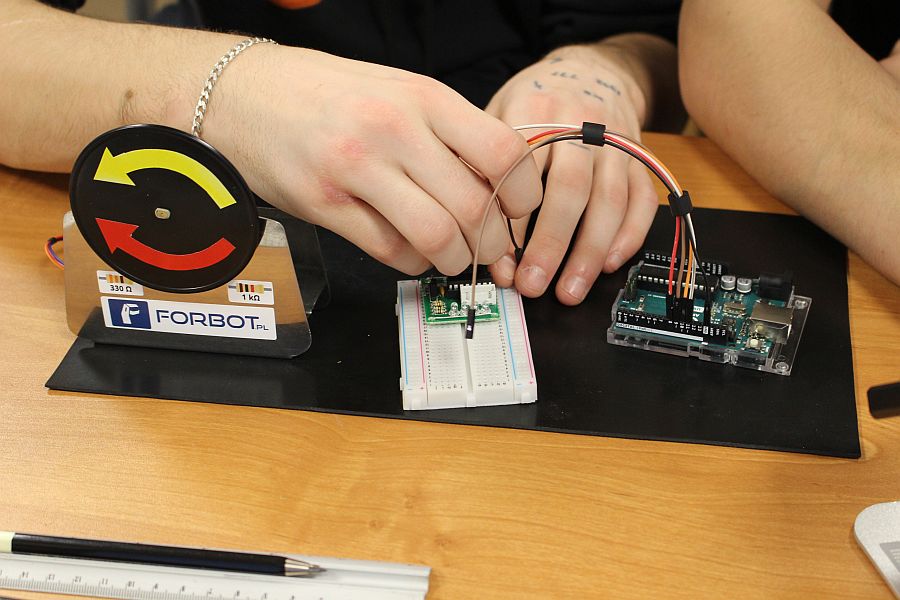
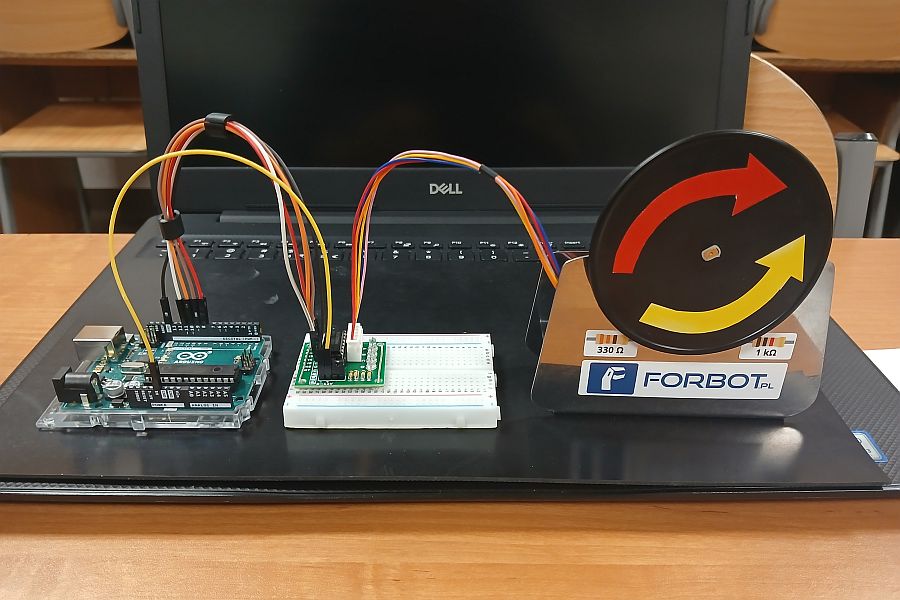
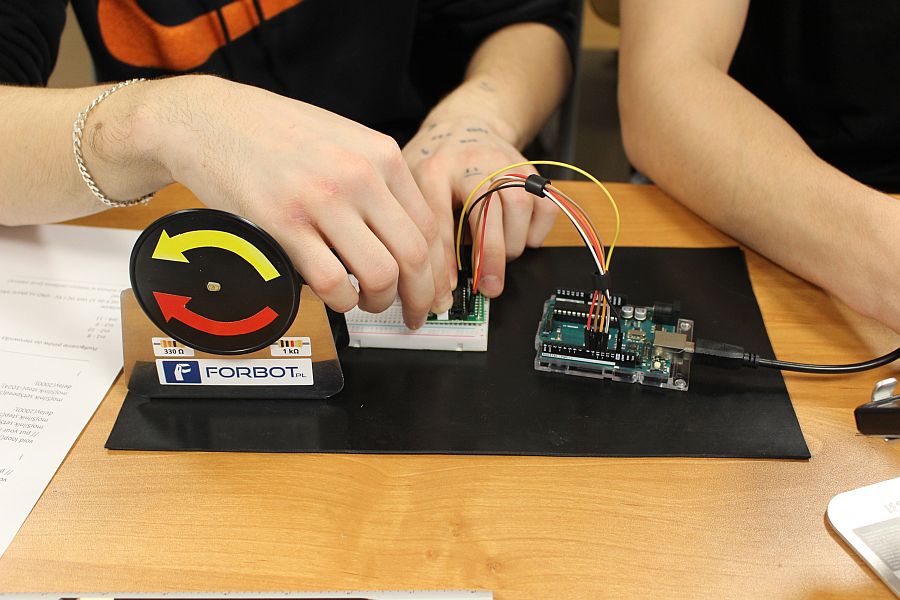
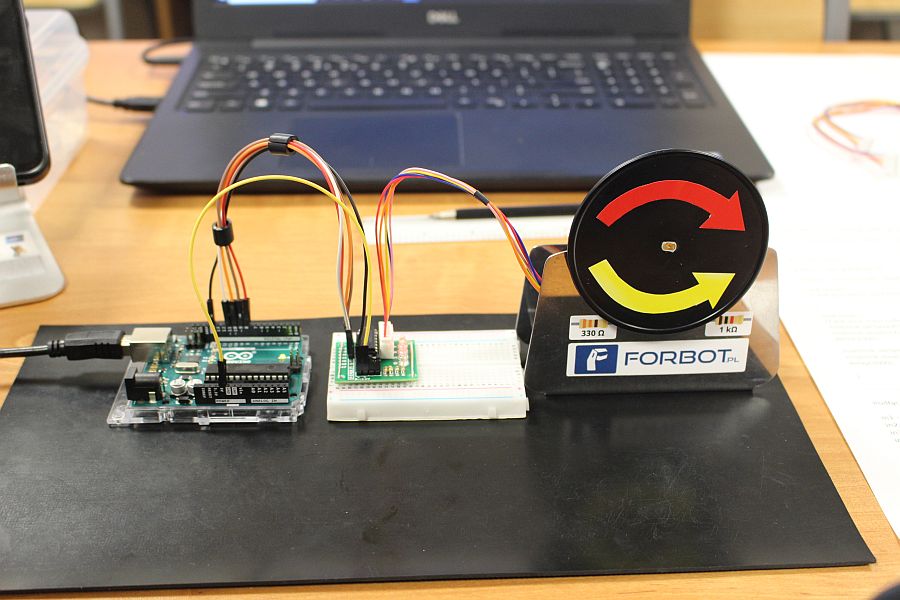
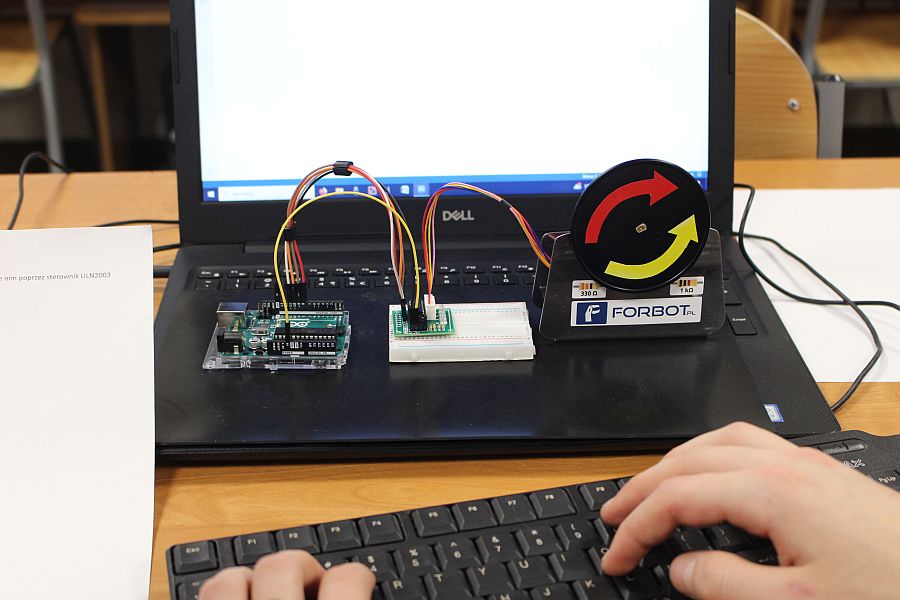
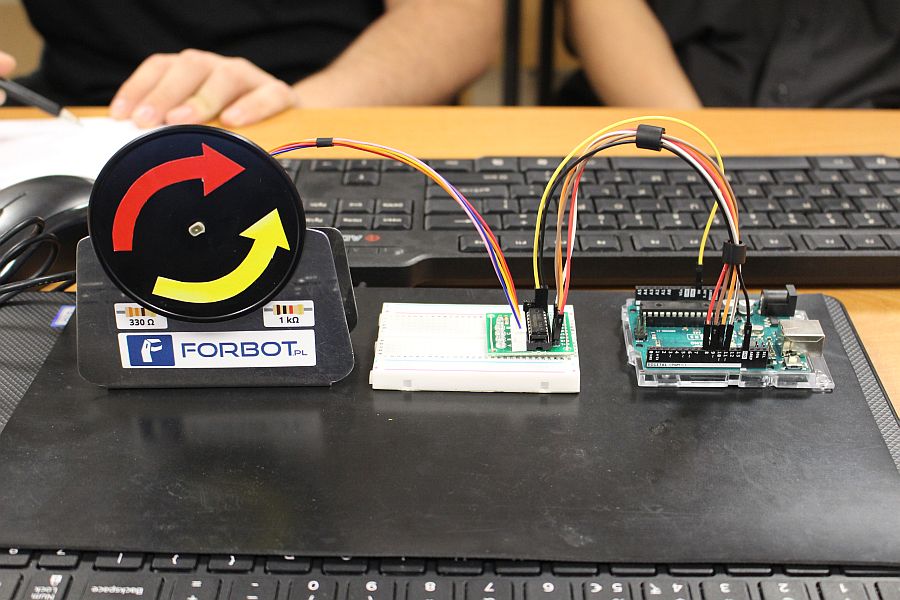
Kolejnym etapem projektu było wykonanie podstawy mocującej do silnika oraz strzałek kierunkowych, które po naklejeniu na koło osiowe wskazują kierunek obrotu pracy silnika. To również samodzielna praca uczniów. Teraz zostało zmontowanie wszystkich elementów w całość.
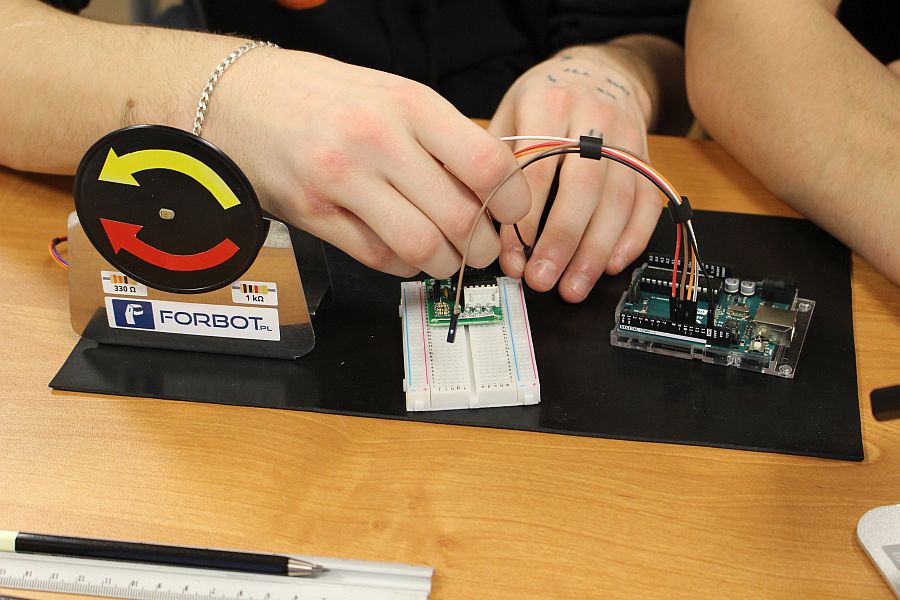
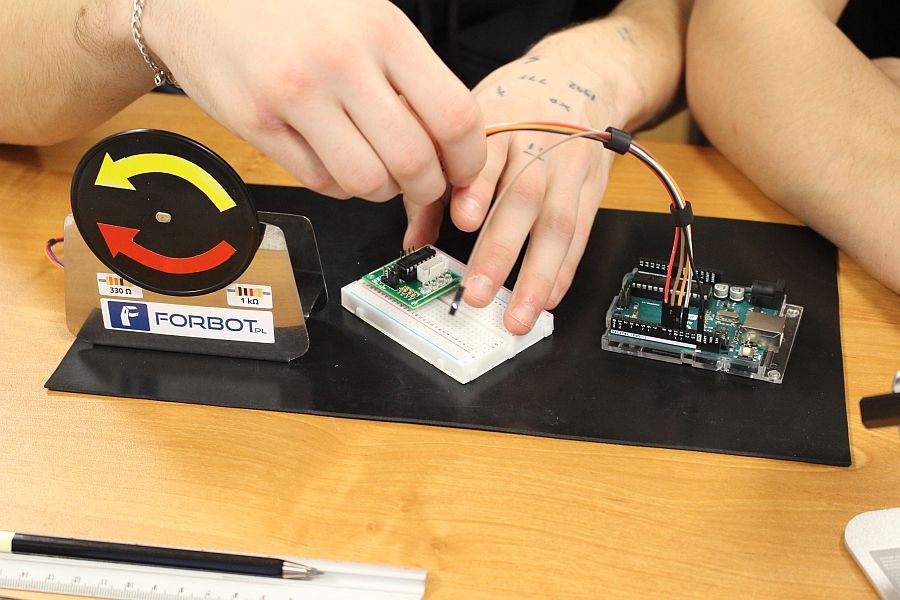
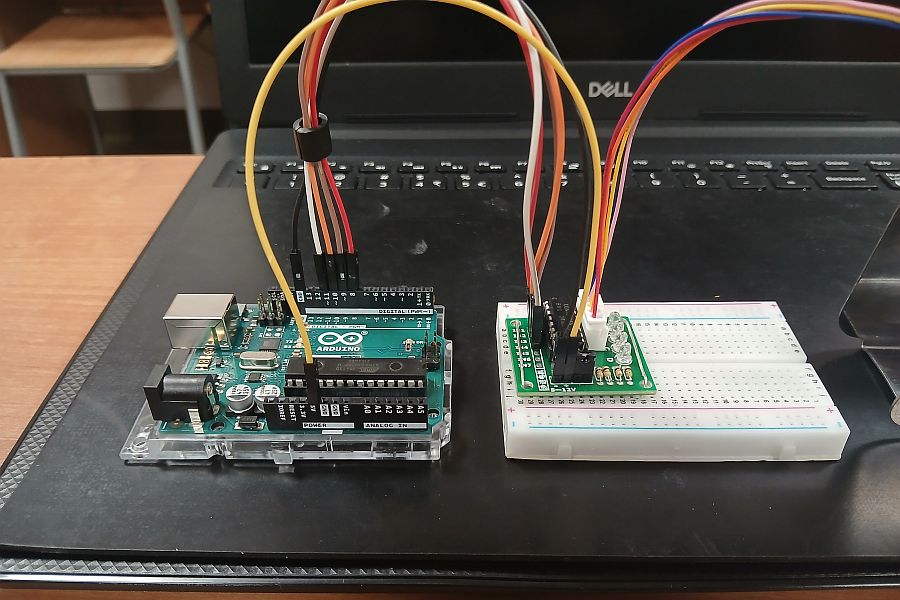
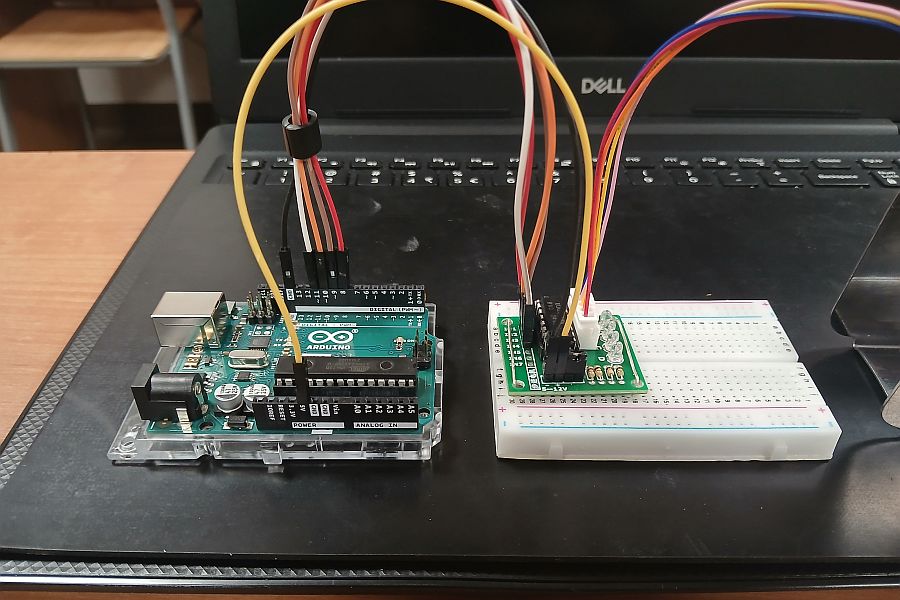
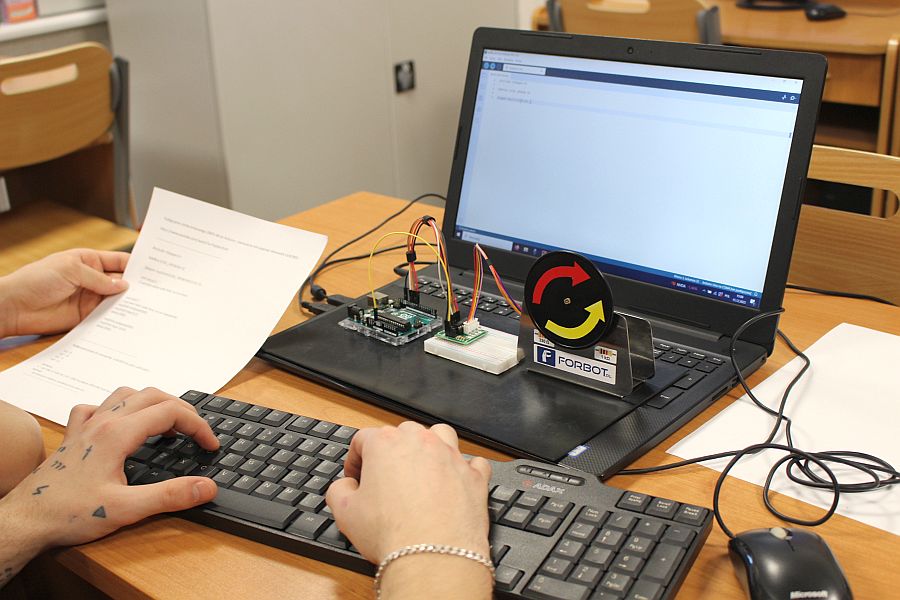
Zbudowany układ mechatroniczny połączony został z komputerem, na którym w aplikacji ARDUINO IDE chłopcy programowali pracę silnika w języku programowania C. Gdy kod programu przeszedł pomyślnie testy, przesłaliśmy go do mikroprocesora ATMEGA na płycie Arduino. Układ z powodzeniem rozpoczął swoją pracę. Silnik wykonuje 180o w przód i 90o w tył. Jednak w kodzie programu sekwencja ta zaprogramowana jest w ilości kroków silnika.
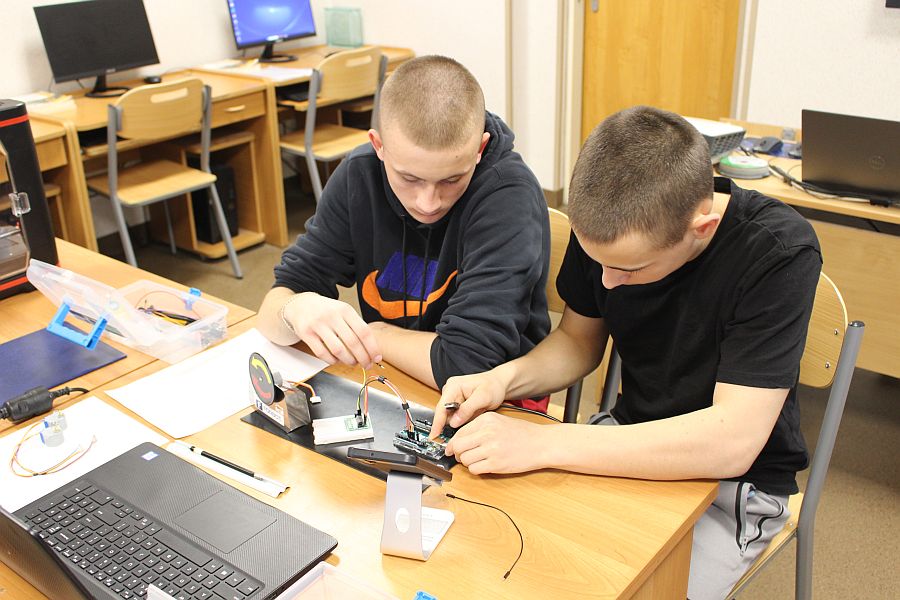
Końcowym etapem naszych prac było oszacowanie granicznych wartości pracy dla naszego układu. Inny już zespół projektowy testował układ. Damian i Wiktor oszacowali najmniejszą i największą wartość liczbową dla kodu programu,
w których obrębie silnik działa bez zakłóceń.
To już kolejny nasz projekt z dziedziny elektroniki i mechatroniki. Jesteśmy niezwykle dumni z tego, że już po raz kolejny ukończyliśmy zadanie z poziomu średniej szkoły technicznej.
Kod źródłowy do programowania pracy układu >>>








































Efekt pracy naszych uczniów prezentuje poniższy materiał filmowy (zalecany włączony dźwięk)
Na koniec mamy kolejną zagadkę dla ambitnych:
W której części kodu źródłowego chłopcy zaprogramowali prędkość obrotu silnika w przód i w tył?
Odpowiedzi proszę wysyłać na skrzynkę naszego koła: robotyka@hoga.pl
 Jeden z zespołów projektowych naszego koła – Damian i Wiktor,
Jeden z zespołów projektowych naszego koła – Damian i Wiktor,
którzy pracują nad projektami elektronicznymi ARDUINO.
Wkrótce – budowa układu elektronicznego na płycie ARDUINO UNO Q2
Opracował – Krystian Machowczyk